SDP-Net: Scene Flow Based Real-time Object Detection and Prediction from Sequential 3D Point Clouds
Yi Zhang (Zhejiang University), Yuwen Ye (Zhejiang University), Zhiyu Xiang (Zhejiang University)*, Jiaqi Gu (Zhejiang University)
Keywords: 3D Computer Vision
Abstract:
Robust object detection in 3D point clouds faces the challenges caused by sparse range data. Accumulating multi-frame data could densify the 3D point clouds and greatly benefit detection task. However, accurately aligning the point clouds before the detecting process is a difficult task since there may exist moving objects in the scene. In this paper a novel scene flow based multi-frame network named SDP-Net is proposed. It is able to perform multiple tasks such as self-alignment, 3D object detection, prediction and tracking simultaneously. Thanks to the design of scene flow and the scheme of multi-task, our network is capable of working effectively with a simple network backbone. We further improve the annotations on KITTI RAW dataset by supplementing the ground truth. Experimental results show that our approach greatly outperforms the state-of-the-art and can perform multiple tasks in real-time.
SlidesLive
Similar Papers
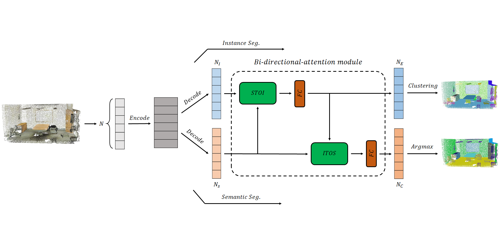
Bi-Directional Attention for Joint Instance and Semantic Segmentation in Point Clouds
guangnan wu (Shandong university)*, Zhiyi Pan (Shandong University), Peng Jiang (Shandong University), Changhe Tu (Shandong University)
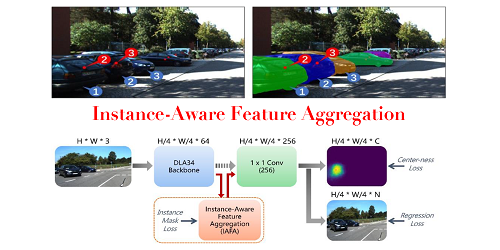
IAFA: Instance-Aware Feature Aggregation for 3D Object Detection from a Single Image
Dingfu Zhou (Baidu)*, Xibin Song (Baidu), Yuchao Dai (Northwestern Polytechnical University), Junbo Yin (Beijing Institute of Technology), Feixiang Lu (Baidu), Miao Liao (Baidu), Jin Fang (Baidu ), Liangjun Zhang (Baidu)
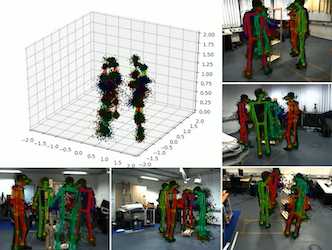
Recursive Bayesian Filtering for Multiple Human Pose Tracking from Multiple Cameras
Oh-Hun Kwon (University of Bonn), Julian Tanke (University of Bonn)*, Jürgen Gall (University of Bonn)