Recursive Bayesian Filtering for Multiple Human Pose Tracking from Multiple Cameras
Oh-Hun Kwon (University of Bonn), Julian Tanke (University of Bonn)*, Jürgen Gall (University of Bonn)
Keywords: Motion and Tracking
Abstract:
Markerless motion capture allows the extraction of multiple 3D human poses from natural scenes, without the need for a controlled but artificial studio environment or expensive hardware. In this work we present a novel tracking algorithm which utilizes recent advancements in 2D human pose estimation as well as 3D human motion anticipation. During the prediction step we utilize an RNN to forecast a set of plausible future poses while we utilize a 2D multiple human pose estimation model during the update step to incorporate observations. Casting the problem of estimating multiple persons from multiple cameras as a tracking problem rather than an association problem results in a linear relationship between runtime and the number of tracked persons. Furthermore, tracking enables our method to overcome temporary occlusions by relying on the prediction model. Our approach achieves state-of-the-art results on popular benchmarks for 3D human pose estimation and tracking.
SlidesLive
Similar Papers
A Sparse Gaussian Approach to Region-Based 6DoF Object Tracking
Manuel Stoiber (German Aerospace Center (DLR))*, Martin Pfanne (German Aerospace Center), Klaus H. Strobl (DLR), Rudolph Triebel (German Aerospace Center (DLR)), Alin Albu-Schaeffer (Robotics and Mechatronics Center (RMC), German Aerospace Center (DLR))
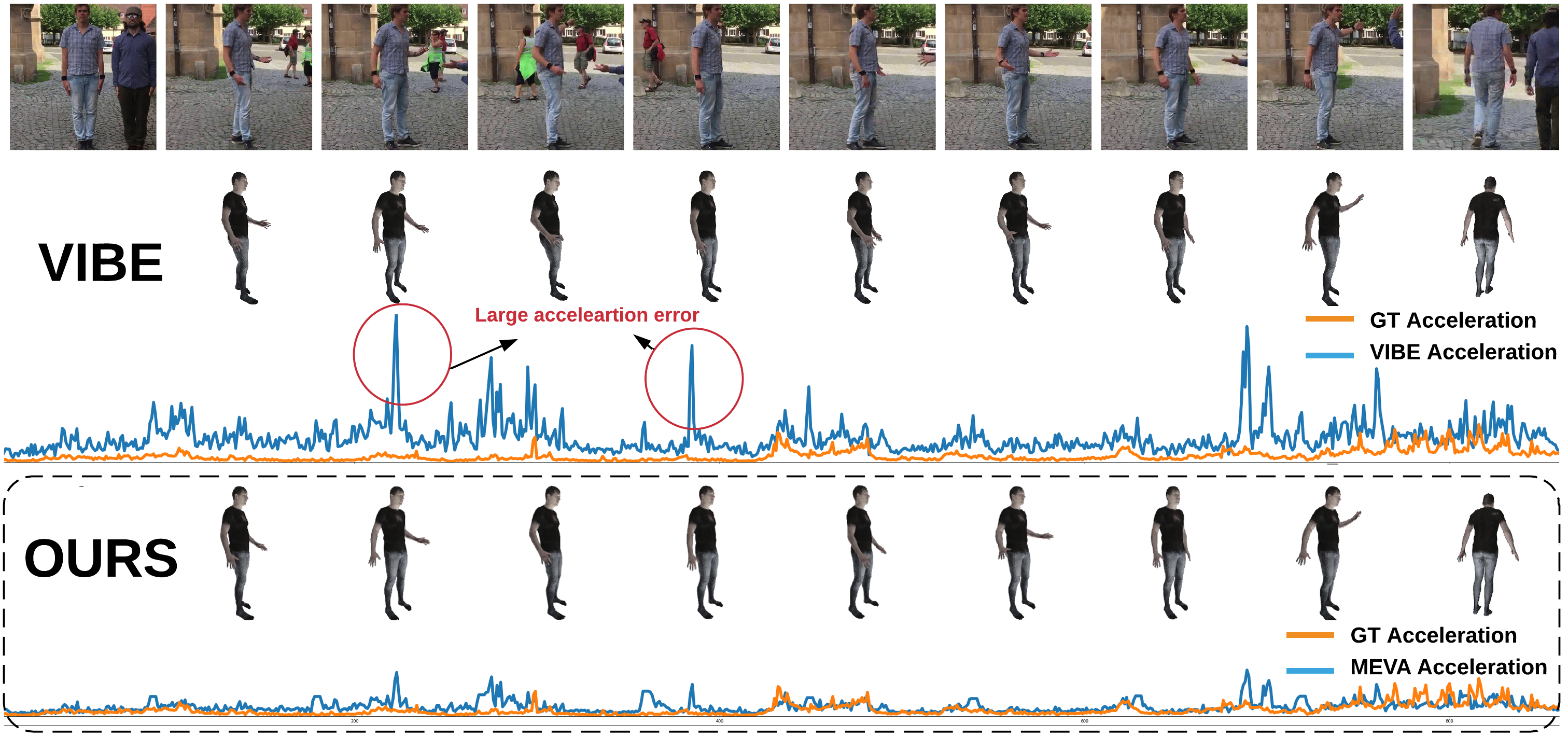
3D Human Motion Estimation via Motion Compression and Refinement
Zhengyi Luo (Carnegie Mellon University)*, S. Alireza Golestaneh (Carnegie Mellon University), Kris M. Kitani (Carnegie Mellon University)
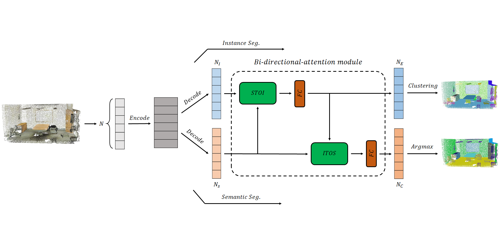
Bi-Directional Attention for Joint Instance and Semantic Segmentation in Point Clouds
guangnan wu (Shandong university)*, Zhiyi Pan (Shandong University), Peng Jiang (Shandong University), Changhe Tu (Shandong University)