Point Proposal based Instance Segmentation with Rectangular Masks for Robot Picking Task
Satoshi Ito (Toshiba Corporation)*, Susumu Kubota (Toshiba Corporation)
Keywords: Applications of Computer Vision, Vision for X
Abstract:
In this paper, we focus on instance segmentation of a top-view image for robot picking task. One difficulty in this setting is that objects are located in various orientations and highly overlapped, where a traditional box proposal approach such as Mask R-CNN does not work well because more than one objects often have very similar bounding-boxes. To address this issue, we adopt a recently developed point proposal approach. This approach firstly generates point proposals instead of box proposals, then an instance mask is predicted over an image for each proposal point. This procedure enables us to obtain pixel-precise masks even for objects sharing the same bounding-box. However, mask prediction over an image may produce a few false positive pixels apart from objects and these false positives are problematic for robot picking task. To suppress them, we introduce rectangular masks. A rectangular mask for each proposal point restricts the existence area of the corresponding object within the rectangle. The experimental result on WISDOM dataset shows that our method achieves superior performance to Mask R-CNN with the same backbone model and introduction of rectangular masks gives small improvement of mask AP and large improvement of box AP.
SlidesLive
Similar Papers
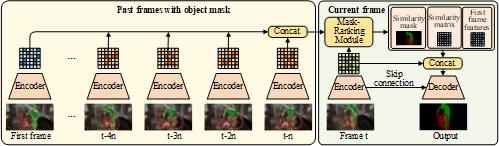
Mask-Ranking Network for Semi-Supervised Video Object Segmentation
Wenjing Li (University of Electronic Science & Technology of China)*, Xiang Zhang (University of Electronic Science & Technology of China), Yujie Hu (University of Electronic Science & Technology of China), Yingqi Tang (University of Electronic Science & Technology of China)
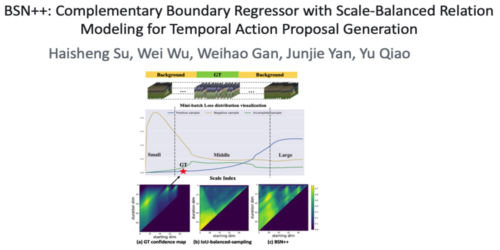
BSN++: Complementary Boundary Generator with Scale-Invariant Relation Modeling for Temporal Action Proposal Generation
Haisheng Su (SenseTime Group Limited)*
DeepSEE: Deep Disentangled Semantic Explorative Extreme Super-Resolution
Marcel C. Bühler (ETH Zürich)*, Andrés Romero (ETH Zürich), Radu Timofte (ETH Zurich)
