Single-Image Camera Response Function Using Prediction Consistency and Gradual Refinement
Aashish Sharma (National University of Singapore)*, Robby T. Tan (Yale-NUS College), Loong-Fah Cheong (NUS)
Keywords: Applications of Computer Vision, Vision for X
Abstract:
A few methods have been proposed to estimate the CRF from a single image, however most of them tend to fail in handling general real images. For instance, EdgeCRF based on patches extracted from colour edges works effectively only when the presence of noise is insignificant, which is not the case for many real images; and, CRFNet, a recent method based on fully supervised deep learning works only for the CRFs that are in the training data, and hence fail to deal with other possible CRFs beyond the training data. To address these problems, we introduce a non-deep-learning method using prediction consistency and gradual refinement. First, we rely more on the patches of the input image that provide more consistent predictions. If the predictions from a patch are more consistent, it means that the patch is likely to be less affected by noise or any inferior colour combinations, and hence, it can be more reliable for CRF estimation. Second, we employ a gradual refinement scheme in which we start from a simple CRF model to generate a result which is more robust to noise but less accurate, and then we gradually increase the model's complexity to improve the estimation. This is because a simple model, while being less accurate, overfits less to noise than a complex model does. Our experiments confirm that our method outperforms the existing single-image methods for both daytime and nighttime real images.
SlidesLive
Similar Papers
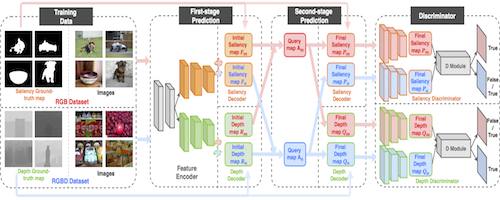
Synergistic Saliency and Depth Prediction for RGB-D Saliency Detection
Yue Wang (Dalian University of Technology), Yuke Li (UC Berkeley), James H. Elder (York University), Runmin Wu (Dalian University of Technology ), Huchuan Lu (Dalian University of Technology)*, Lu Zhang (Dalian University of Technology)
Rotation Equivariant Orientation Estimation for Omnidirectional Localization
Chao Zhang (Toshiba Europe Limited)*, Ignas Budvytis (Department of Engineering, University of Cambridge), Stephan Liwicki (Toshiba Europe Limited), Roberto Cipolla (University of Cambridge)

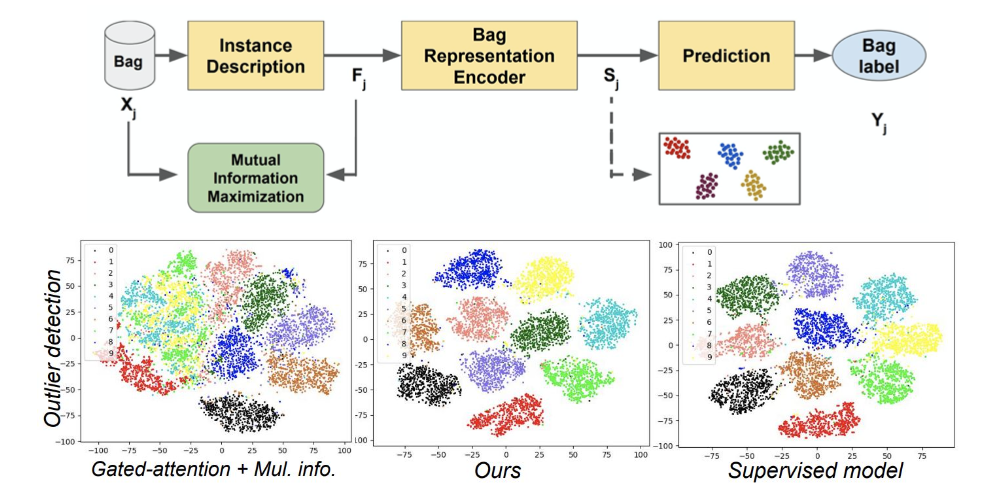
In Defense of LSTMs for Addressing Multiple Instance Learning Problems
Kaili Wang (KU Leuven, UAntwerpen)*, Jose Oramas (UAntwerp, imec-IDLab), Tinne Tuytelaars (KU Leuven)