Tracking-by-Trackers with a Distilled and Reinforced Model
Matteo Dunnhofer (University of Udine)*, Niki Martinel (University of Udine), CHRISTIAN MICHELONI (University of Udine, Italy)
Keywords: Motion and Tracking
Abstract:
Visual object tracking was generally tackled by reasoning independently on fast processing algorithms, accurate online adaptation methods, and fusion of trackers. In this paper, we unify such goals by proposing a novel tracking methodology that takes advantage of other visual trackers, offline and online. A compact student model is trained via the marriage of knowledge distillation and reinforcement learning. The first allows to transfer and compress tracking knowledge of other trackers. The second enables the learning of evaluation measures which are then exploited online. After learning, the student can be ultimately used to build (i) a very fast single-shot tracker, (ii) a tracker with a simple and effective online adaptation mechanism, (iii) a tracker that performs fusion of other trackers. Extensive validation shows that the proposed algorithms compete with real-time state-of-the-art trackers.
SlidesLive
Similar Papers
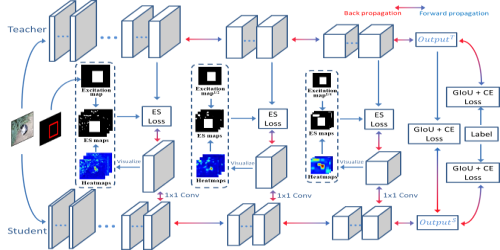
Fully Supervised and Guided Distillation for One-Stage Detectors
Deyu Wang (Canon Information Technology (Beijing) Co., LTD)*, Dongchao Wen (Canon Information Technology (Beijing) Co., LTD), Junjie Liu (Canon Information Technology (Beijing) Co., LTD), Wei Tao (Canon Information Technology (Beijing) Co., LTD), Tse-Wei Chen (Canon Inc.), Kinya Osa (Canon Inc.), Masami Kato (Canon Inc.)
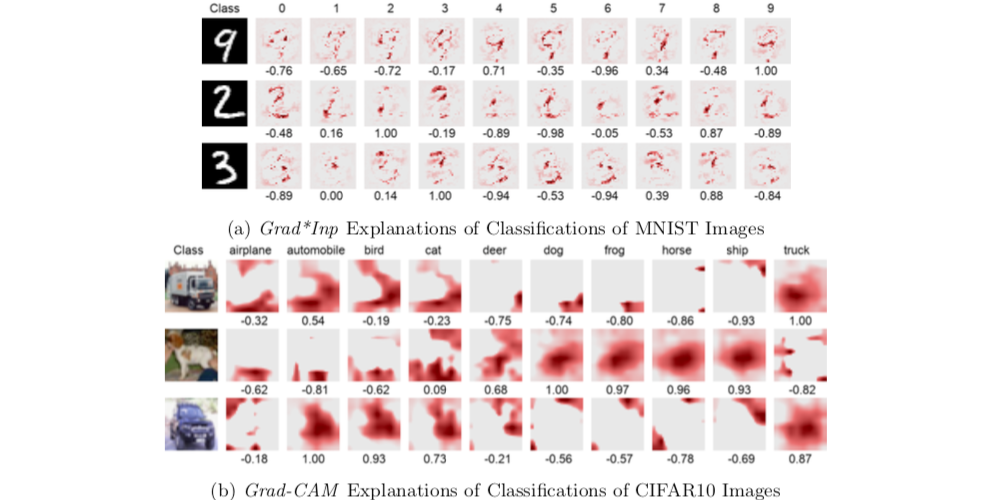
Introspective Learning by Distilling Knowledge from Online Self-explanation
Jindong Gu (University of Munich)*, Zhiliang Wu (Siemens AG and Ludwig Maximilian University of Munich), Volker Tresp (Siemens AG and Ludwig Maximilian University of Munich )
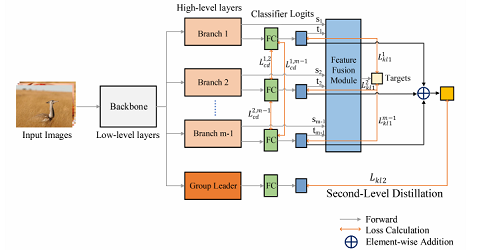
Online Knowledge Distillation via Multi-branch Diversity Enhancement
Zheng Li (Institute of Virtual Reality and Intelligent System, Hangzhou Normal University)*, YING HUANG (Hangzhou Normal University), Defang Chen (Zhejiang University), Tianren Luo (Institute of Virtual Reality and Intelligent System,Hangzhou Normal University), Ning Cai (Institute of Virtual Reality and Intelligent System,Hangzhou Normal University), Zhigeng Pan (Institute of Virtual Reality and Intelligent System,Hangzhou Normal University)