Learning Local Feature Descriptors for Multiple Object Tracking
Dmytro Borysenko (Samsung R&D Institute Ukraine), Dmytro Mykheievskyi (Samsung R&D Institute Ukraine), Viktor Porokhonskyy (Samsung Research&Development Institute Ukraine (SRK))*
Keywords: Motion and Tracking
Abstract:
The present study aims at learning class-agnostic embedding, which is suitable for Multiple Object Tracking (MOT). We demonstrate that the learning of local feature descriptors could provide a sufficient level of generalization. Proposed embedding function exhibits on-par performance with its dedicated person re-identification counterparts in their target domain and outperforms them in others. Through its utilization, our solutions achieve state-of-the-art performance in a number of MOT benchmarks, which includes CVPR'19 Tracking Challenge.
SlidesLive
Similar Papers
Rotation Equivariant Orientation Estimation for Omnidirectional Localization
Chao Zhang (Toshiba Europe Limited)*, Ignas Budvytis (Department of Engineering, University of Cambridge), Stephan Liwicki (Toshiba Europe Limited), Roberto Cipolla (University of Cambridge)

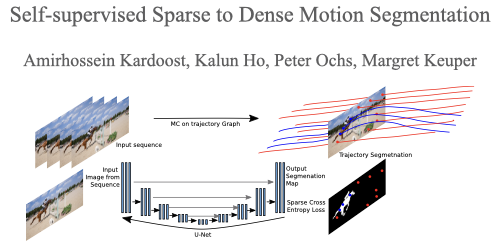
Self-supervised Sparse to Dense Motion Segmentation
Amirhossein Kardoost (University of Mannheim)*, Kalun Ho (Fraunhofer ITWM), Peter Ochs (Saarland University), Margret Keuper (University of Mannheim)
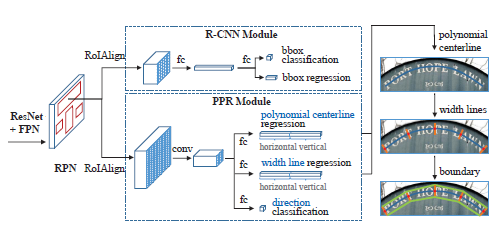
Accurate Arbitrary-Shaped Scene Text Detection via Iterative Polynomial Parameter Regression
Jiahao Shi (Nanjing University), Long Chen (Nanjing University), Feng Su (Nanjing University)*