Adaptive Spatio-Temporal Regularized Correlation Filters for UAV-based Tracking
Libin Xu (Shandong University of Technology), Qilei Li (Sichuan University), Jun Jiang ( Southwest Petroleum University;Sichuan University of Science & Engineering), Guofeng Zou (Shandong University of Technology), Zheng Liu (University of British Columbia), Mingliang Gao (Shandong University of Technology)*
Keywords: Motion and Tracking
Abstract:
The advance of visual tracking has provided unmanned aerial vehicle (UAV) with the intriguing capability for various practical applications. With promising performance and efficiency, discriminative correlation filter (DCF)-based trackers have drawn great attention and undergone remarkable progress. However, the boundary effect and filter degradation remain two challenging problems. In this work, we propose a novel Adaptive Spatio-Temporal Regularized Correlation Filter (ASTR-CF) model to address these two problems. The ASTR-CF can optimize the spatial regularization weight and the temporal regularization weight simultaneously. Meanwhile, the proposed model can be effectively optimized based on the alternating direction method of multipliers (ADMM), where each subproblem has a closed-form solution. Experimental results on DTB70 and UAV123@10fps benchmarks have proven the superiority of our method compared to the state-of-the-art trackers in terms of both accuracy and computational speed.
SlidesLive
Similar Papers
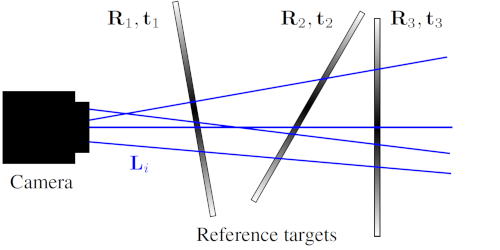
A Calibration Method for the Generalized Imaging Model with Uncertain Calibration Target Coordinates
David Uhlig (Karlsruhe Institute of Technology)*, Michael Heizmann (Karlsruher Institut fuer Technologie)
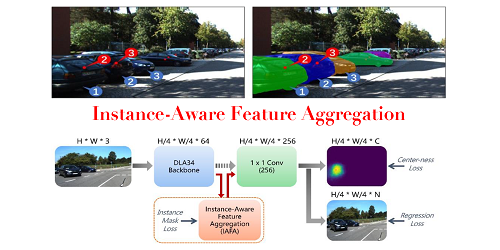
IAFA: Instance-Aware Feature Aggregation for 3D Object Detection from a Single Image
Dingfu Zhou (Baidu)*, Xibin Song (Baidu), Yuchao Dai (Northwestern Polytechnical University), Junbo Yin (Beijing Institute of Technology), Feixiang Lu (Baidu), Miao Liao (Baidu), Jin Fang (Baidu ), Liangjun Zhang (Baidu)
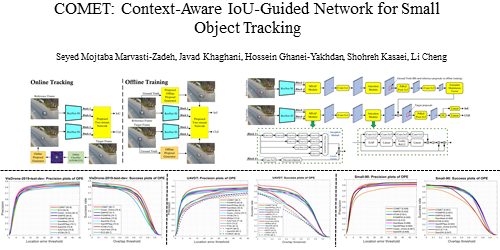
COMET: Context-Aware IoU-Guided Network for Small Object Tracking
Seyed Mojtaba Marvasti-Zadeh (University of Alberta)*, Javad Khaghani (University of Alberta), Hossein Ghanei-Yakhdan (Yazd University), Shohreh Kasaei (Sharif University of Technology), Li Cheng (ECE dept., University of Alberta)